
Einsatz in Gefahrenzonen: Physisches Feedback für Piloten hilft Maschine bei der Balance. [...]
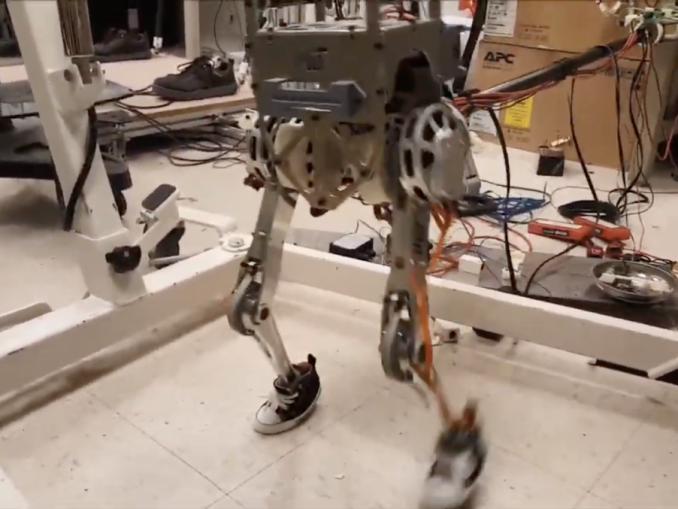
Forscher der University of Illinois und des Massachusetts Institute of Technology haben mit „Little Hermes“ einen Laufroboter entwickelt, der in Echtzeit die Bewegungen eines Menschen imitiert. Indem der Mensch physisches Feedback erhält, wenn der Roboter berührt wird, sind seine Bewegungen komplett synchron mit denen der Maschine. Dadurch erhält der Roboter menschenartige Reflexe und kann die Balance besser halten.
„Stürze vermeiden“
„Es macht Sinn, dem Menschen am Steuer ein physisches Feedback zu geben. So kann der Roboter Stürze vermeiden und seine Aufgabe so schneller und verlässlicher bewältigen. Die Frage ist, ob Laufroboter nicht früher oder später auch vollautonom arbeiten sollten. Aber bis dahin ist das auf jeden Fall die präzisere Lösung“, meint Hubert Gattringer, stellvertretender Leiter des Instituts für Robotik an der Johannes Kepler Universität, gegenüber pressetext.
Der zweibeinige Roboter wird von einem Menschen, der einen Motion-Capturing-Anzug trägt, ferngesteuert. Der Anzug überträgt die Bewegungen des Menschen auf den Roboter. Um zu spüren, wenn die Maschine auf Widerstand stößt, übt der Anzug an der entsprechenden Stelle Druck auf den menschlichen Piloten aus. So kann der Mensch der Maschine helfen, die Balance zu halten. Der Roboter kann dadurch sogar springen, ohne umzufallen.
Idee nach Fukushima
Koentwickler João Ramos von der University of Illinois meint, der Roboter könnte bei Notfalleinsätzen in Räume geschickt werden, die für einen Menschen zu gefährlich wären. „Wir wurden dazu motiviert, als wir den Verlauf der Fukushima-Katastrophe sahen. Wir dachten, wenn ein Roboter das Kernkraftwerk nach dem Unglück hätte betreten können, hätte die Sache anders ausgehen können“, so Ramos.
Dem Forscher zufolge sind Roboter noch relativ weit davon entfernt, autonom laufen und arbeiten zu können. Es sei momentan noch vielversprechender, den Menschen als Hifsmittel für die Maschinen zu verwenden. Mit dieser Technologie sei es auch möglich, die Bewegung von anderen Körperteilen zu übertragen. Auch bei Robotern auf vier Beinen oder Rädern sei das Prinzip anwendbar.









Be the first to comment