
Das von Elon Musk mitgegründete KI-Labor OpenAI zeigt, dass eine Roboterhand ausschließlich mithilfe von Simulationen eine gewisse Fingerfertigkeit erlernen kann. [...]

Dazu übt das von dem KI-Labor OpenAI entwickelte System namens „Dactyl“ in der virtuellen Welt, um das dort Gelernte dann auf die Realität zu übertragen. So kann die Hand dann relativ geschickt mit einem Würfel hantieren. An menschliche Fingerfertigkeit kommt sie zwar noch nicht heran, doch die Lernmethode ist nach angaben der Forscher vielversprechend.
Greifen begreifen
Das Greifen eines Apfels oder einer Kaffeetasse ist für Menschen eine einfache Sache, für Roboter hingegen eine sehr komplexe Aufgabe. Heutige kommerzielle Roboterarme sind daher meist nur für ganz bestimmte Aufgaben programmiert, etwa für bestimmte Handgriffe an einem Fließband in einer Autofabrik. Das System von OpenAI zeigt, wie Roboterhände in Zukunft vielseitiger werden könnten, indem sie sich selbst neue Tricks beibringen.
Dactyl ist ein System, das dazu praktisch virtuell durch Versuch und Irrtum lernt. Im Experiment besteht die Aufgabe darin, einen Würfel mit einer bestimmten Seite nach oben zu drehen. In einer realen Stunde häuft Dactyl dabei mithilfe von Methoden des Tiefenlernens und randomisierten Bedingungen in der virtuellen Welt rund zwei Jahre simulierte Erfahrung an. In dieser Zeit hat die KI ganz von selbst gelernt, Finger und Hand auf menschenähnliche Art zu bewegen, um ihr Ziel ihr erreichen.
Unvergleichlich geschickt
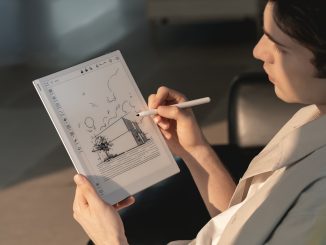
Das System hat dann eine echte „Dextrous Hand, also eine geschickte Greifhand der Shadow Robot Company gesteuert, die einen Würfel drehen musste. Dabei habe es dem Team zufolge ein „noch nie dagewesenen Grad an Geschicklichkeit einer physischen Hand mit fünf Fingern“ gezeigt. Allerdings bleibt noch viel Luft nach oben. Das System konnte nach hundert Jahren virtuellem Training nur 13 von 50 Mal den realen Würfel korrekt ausrichten. Ein Kleinkind lernt das viel besser und schneller.
Obgleich noch viel Forschungsaufwand nötig ist, bis selbstlernende Roboterhände mit menschenänlichem Geschick Realität sind, ist das Experiment dennoch ein Meilenstein. Denn das Resümee der Forscher lautet.“Unsere Ergebnisse zeigen, dass entgegen verbreiteter Annahme heutige tiefe Randomized-Learning-Algorithmen genutzt werden können, um komplexe reale Robotik-Aufgaben zu lösen, die für nicht lernbasierte Zugänge außer Reichweite sind.“
So sieht es aus, wenn eine Roboterhand einen Würfel dreht:
Sie sehen gerade einen Platzhalterinhalt von YouTube. Um auf den eigentlichen Inhalt zuzugreifen, klicken Sie auf die Schaltfläche unten. Bitte beachten Sie, dass dabei Daten an Drittanbieter weitergegeben werden.








Be the first to comment